




In our previous entry we mentioned how lateral load transfer is, on one side, responsible for an overall cornering potential reduction, compared to an ideal case where a car would turn without experiencing any load transfer (see, with its CG at the ground level) and, on the other side, can be used by the engineers as a very effective tool to tune vehicle handling.
In this article, we will try to understand how load transfer happens and which parameters influence it and which portion of it will be experienced by an axle.
The first point to stress again is that the overall load transfer that a car experiences, travelling on a circular path of radius R at constant velocity V (and, hence, with constant lateral acceleration Ay=V2/R) is always about the same, no matter what we do in terms of tuning. What we can do is only influence which portion of the total lateral load transfer will be taken by each axle. The bigger the portion of weight transfer taken by an axle, the lower the cornering potential of that axle.
A typical approach consists in dividing the load transfer that each axle experience in three main components: one related to the unsprung mass, which is composed more or less by all the components seating after the spring in our suspension system (see wheels, tyres, brakes, part of the control arms, etc) and two related to the sprung mass, which is all what is “suspended” by car’s suspensions. Among these second two, a part is often called “elastic load transfer” and is linked strictly to the elastic elements of a suspension, see springs and antiroll bars. The other one is normally identified as “geometric load transfer” and depends on suspensions geometry. Although this approach has merits, including that of making the first approximated calculations very straightforward, it doesn’t show the whole picture and falls short in particular cases. This is why we will simply explain what happens when a car negotiates a corner, trying to stick to first principles and basic physics.
For sake of simplicity, we will once again only consider steady state cornering. Before we go into the details about how load transfer happens, it can help to define how car’s chassis/body moves with respect to the ground and look very briefly at suspensions role.
As any physical body in a space, a car’s chassis/body can move in three directions and can rotate around three axis (se say it has six degrees of freedom, three translational and three rotational). Focusing on the rotations, we will identify as roll the rotation of car’s chassis around a longitudinal axis (x in the following picture), pitch the rotation around a lateral axis and yaw the rotation around the vertical axis.

Of course, any combinations of these motions are also possible and, actually, normally a car moves combining more of them.
Since we are dealing with a pure cornering situation, we will focus only on roll for now and, in particular, we will concentrate our attention on how racecars suspensions work in roll.
If we consider one axle only, we can still analyze what happens during cornering modelling the system as a three masses assembly, with one being the portion of the sprung mass leaning on the axle (basing on static weight distribution) and the other two being left and right unsprung masses.
The unsprung mass load transfer simply depends on how big the unsprung mass is and on where its CG is located. As a car overall mass can be separated in two main parts, sprung and unsprung, it is also possible to identify separate centres of mass (CG) for the unsprung masses and for the sprung mass.
A first often used approximation consists in assuming that the unsprung mass CG seats at wheel centre height. Unsprung mass load transfer is given by:
![]()
Where:
LTun is the unsprung mass load transfer;
mun is the unsprung mass of the whole axle;
CGhun is the height of the CG of the unsprung mass, normally the same left and right;
Ay is the centripetal acceleration;
T is the track width of the axle we consider.
The equation shows how load transfer is basically given by a moment (Unsprung mass multiplied by the centripetal acceleration is a force, which being then multiplied by the height of the unsprung mass CG generates a moment) divided by the track width. The only way to influence LTun is to act on design parameters, like how heavy are the unsprung components. This means, this parameter is normally a given for a race engineer and cannot be used to tune the car.
Summing the load transfer of the four unsprung masses we have in a car, we can get the overall unsprung mass load transfer for the vehicle.
The contribution of the sprung mass on the whole vehicle load transfer can be calculated in a very similar manner, as it will depend on the sprung mass CG height and track width.
![]()
Where:
LTspr is the sprung mass load transfer;
Mspr is the sprung mass;
CGhspr is the height of the CG of the sprung mass;
Ay is the centripetal acceleration;
T is the track width.
Summing together sprung and unsprung masses load transfers, we get the whole vehicle load transfer.
As already discussed, what is interesting to know, anyway, is how the overall load transfer will be split between front and rear axle, as this is a tuning parameter influencing a lot vehicle’s handling. As we saw, engineers normally talk about total lateral load transfer distribution (TLLTD); TLLTD is influenced by several suspension parameters, some related to the geometry and some to the stiffness of the elastic components.
We first need to describe how vehicle’s body can move in roll. This is strictly related to suspension kinematics, as the two suspension systems in a car are what define how the chassis can move with respect to the wheels: assuming the wheels stay in contact with the ground (and ignoring tyres deformation for the time being), this also defines how the chassis move with respect to the ground. As we will see, in order to roll, a car will have to experience a deformation of some elastic elements, namely springs and antiroll bars.
In a conventional suspension, the first can be assumed to be active every time a wheel moves vertically, this meaning springs have an effect in both roll and heave (body vertical motion). On the other hand, the antiroll bar is a device that connects the two corners of one axle and it is activated only when the vertical travel of one wheel is different to that of the other one.

This means when a car rolls, there will be a deflection of springs and antiroll bars. The springs seating on the outer side of the car with respect of the corner will compress (reduce their length with respect to straight line motion at the same speed), while the ones seating on the inner side will extend (increase their length with respect to straight line motion at the same speed).
Beside springs and antiroll bars, very important are also the effects of tyres vertical stiffness, as the tyres are seen by the vehicle as a spring in series with springs and antiroll bars. This means, to calculate how much the car rolls, also the tyres and their deflections have to be taken into account. As we will see, the forces involved in the deformation of these components (and, hence, their stiffness) play a central role in defining how the total load transfer will be split between front and rear axle.
What about suspension kinematics and its effect on load transfer?
A racecar suspension can be simplified in two dimensions (which means, projecting every element on a plane passing through the two tyres contact patches and seating vertically with respect to the ground) in what is called a “four bars linkage”. The four links in questions are, from left to right in the following picture, the wheel/upright assembly, in contact with the ground at the contact patch, the upper control arm, the lower control arm and car’s chassis.

Actually, most often a racecar suspension cannot be considered a 2D mechanism, but this simplification is very useful to keep the explanation simple.
We normally define wheel travel the distance covered vertically (or in Z direction, in the coordinate system we introduced previously) by the wheel (or by any point of it, although common practice is to consider the center of tyres contact patch or the wheel center).
In a 2D four bars linkage, where we consider car’s chassis to be fixed and the wheel/upright assembly to be free to move with respect to it, the wheel assembly will move on a path that, in each instant, will be circular with its center at the intersection point of the lines obtained elongating the control arms segments.
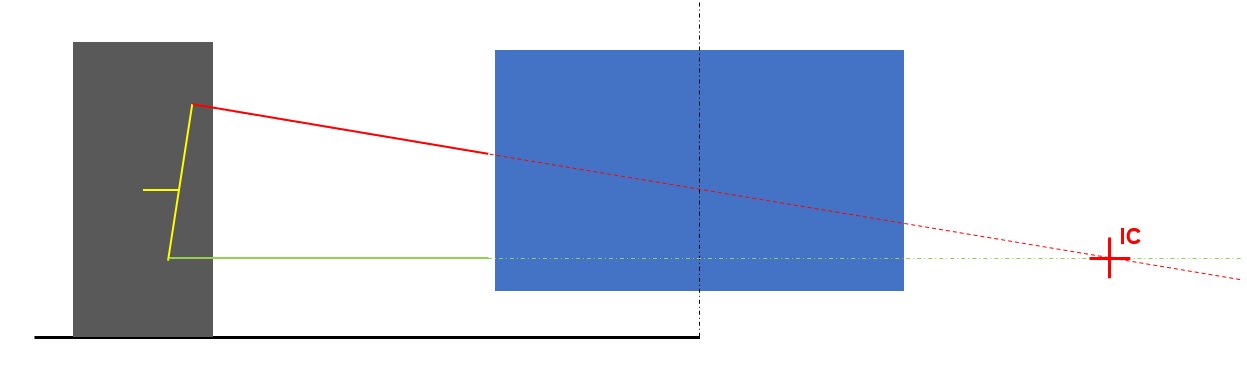
This means, the center of this circular path can be considered a pin point in the movement of the wheel (contact patch) with respect to the body. Its position will change, depending on the wheel travel, but in each instant we can represent our suspension using a bar connecting the contact patch (or each point of interest belonging to the wheel/upright assembly) and this point.
This point is normally called instant center (IC in our previous picture) and, as we will see, it is an extremely important concept.
At this point, somebody has surely already recognized how the instant center would be undefined when the upper and lower control arms are (in a certain suspension position) perfectly parallel to each other. We will come back later to this interesting case.

The instant centre position has not only an effect on suspension kinematics (its position determines the arc on which the wheel moves and this influences how parameters like camber and track width change), but it is also important because the line connecting the contact patch to the instant centre defines the only direction that a force applied to the wheel (tyre) at the contact patch can act on, without causing a rotation of the wheel itself around the instant centre (roll).
The following picture help to understand this point, which is crucial to figure out how suspension kinematics affects lateral load transfer. If we have a bar (which we suppose to be rigid) with a free end and another end located in a pin point, we can apply a force to the bar avoiding its rotation only if said force has the same direction of the bar.













